Octree¶
An octree is a tree data structure where each internal node has eight children. Octrees are commonly used for spatial partitioning of 3D point clouds. Non-empty leaf nodes of an octree contain one or more points that fall within the same spatial subdivision. Octrees are a useful description of 3D space and can be used to quickly find nearby points. Open3D has the geometry type Octree that can be used to create, search, and traverse octrees with a user-specified maximum tree depth,
max_depth.
From point cloud¶
An octree can be constructed from a point cloud using the method convert_from_point_cloud. Each point is inserted into the tree by following the path from the root node to the appropriate leaf node at depth max_depth. As the tree depth increases, internal (and eventually leaf) nodes represents a smaller partition of 3D space.
If the point cloud has color, the the corresponding leaf node takes the color of the last inserted point. The size_expand parameter increases the size of the root octree node so it is slightly bigger than the original point cloud bounds to accommodate all points.
[2]:
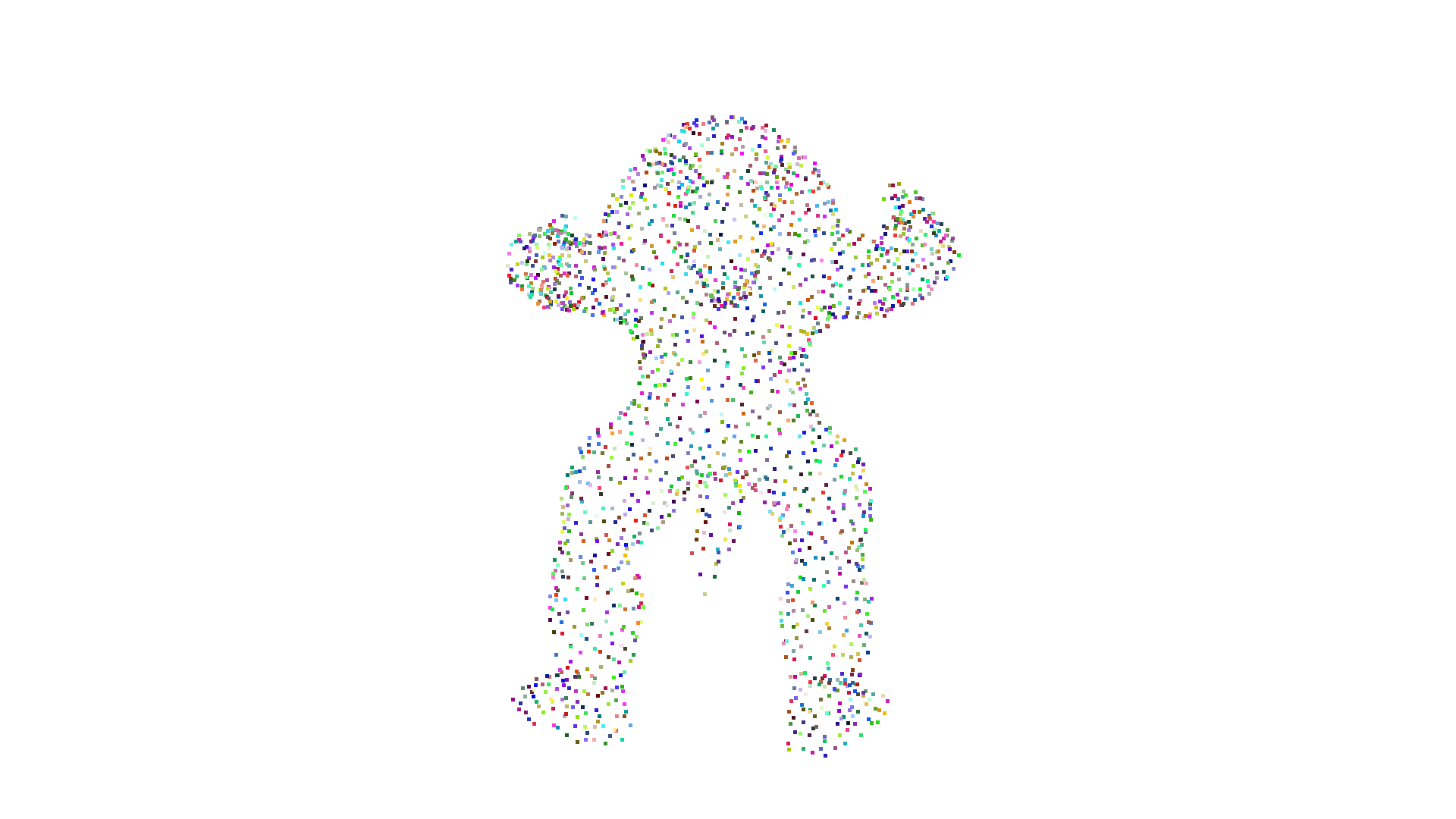
print('input')
N = 2000
armadillo = o3d.data.ArmadilloMesh()
mesh = o3d.io.read_triangle_mesh(armadillo.path)
pcd = mesh.sample_points_poisson_disk(N)
# fit to unit cube
pcd.scale(1 / np.max(pcd.get_max_bound() - pcd.get_min_bound()),
center=pcd.get_center())
pcd.colors = o3d.utility.Vector3dVector(np.random.uniform(0, 1, size=(N, 3)))
o3d.visualization.draw_geometries([pcd])
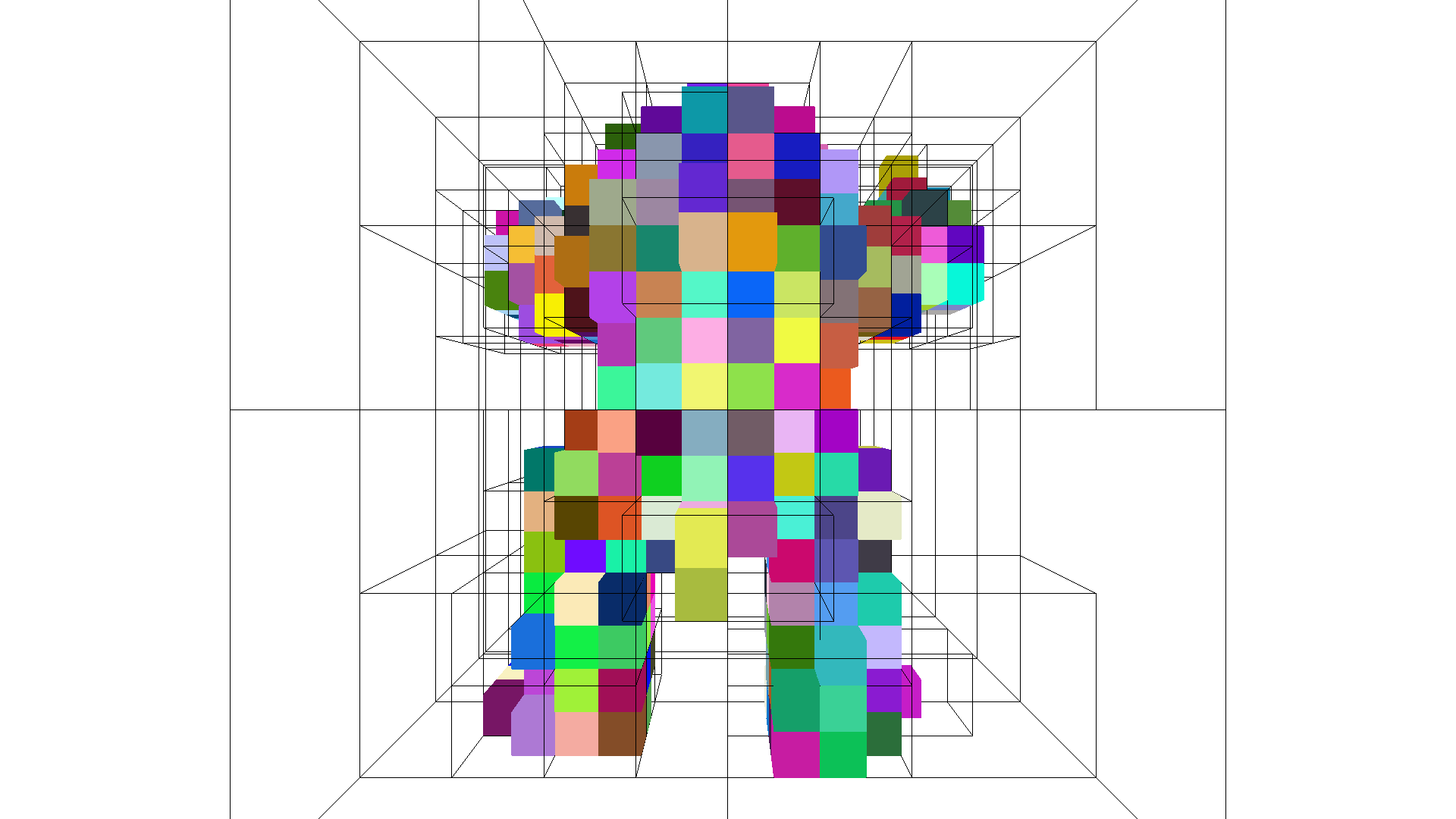
print('octree division')
octree = o3d.geometry.Octree(max_depth=4)
octree.convert_from_point_cloud(pcd, size_expand=0.01)
o3d.visualization.draw_geometries([octree])
input
octree division
From voxel grid¶
An octree can also be constructed from an Open3D VoxelGrid geometry using the method create_from_voxel_grid. Each voxel of the input VoxelGrid is treated as a point in 3D space with coordinates corresponding to the origin of the voxel. Each leaf node takes the color of its corresponding voxel.
[3]:
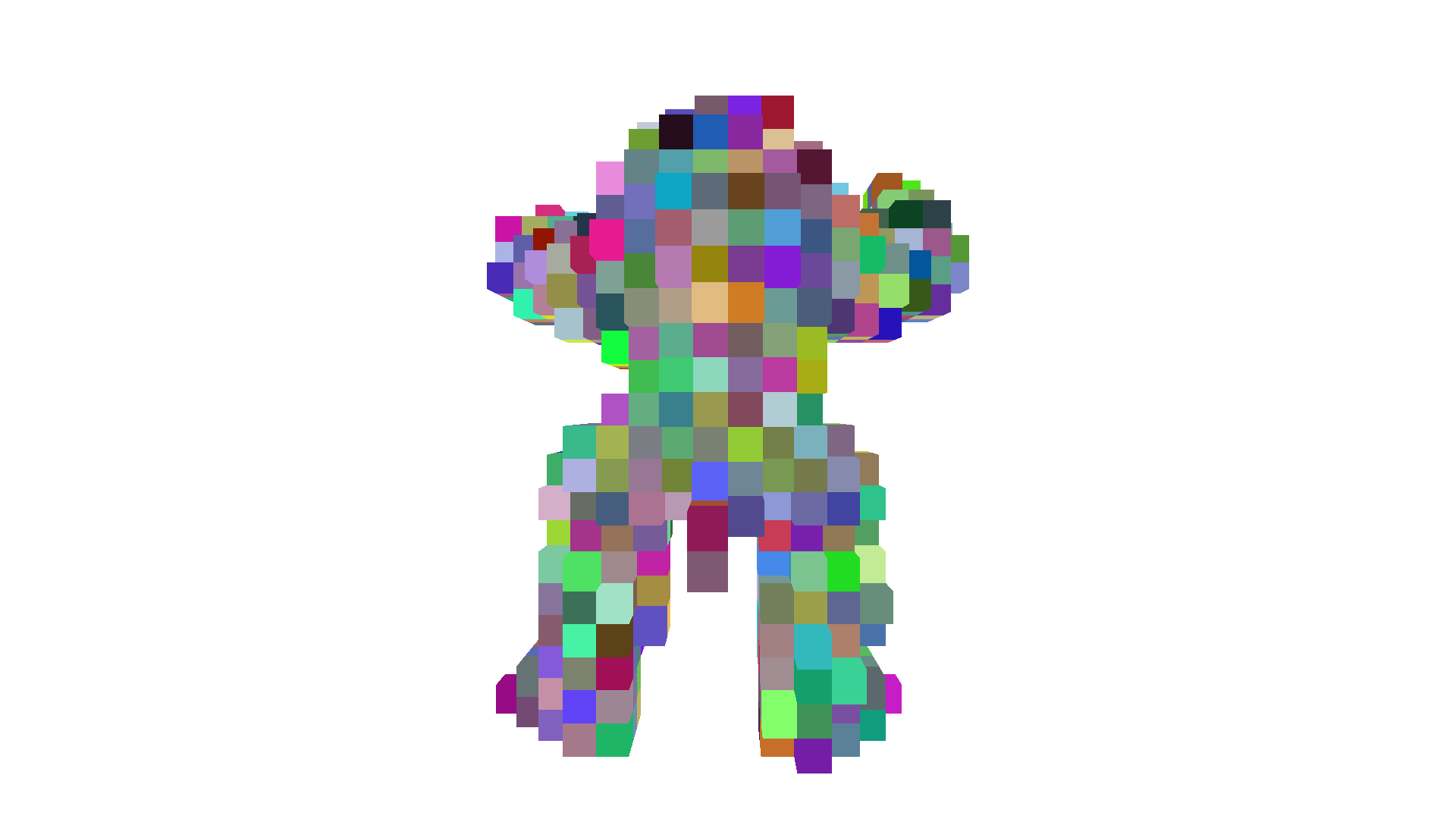
print('voxelization')
voxel_grid = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd,
voxel_size=0.05)
o3d.visualization.draw_geometries([voxel_grid])
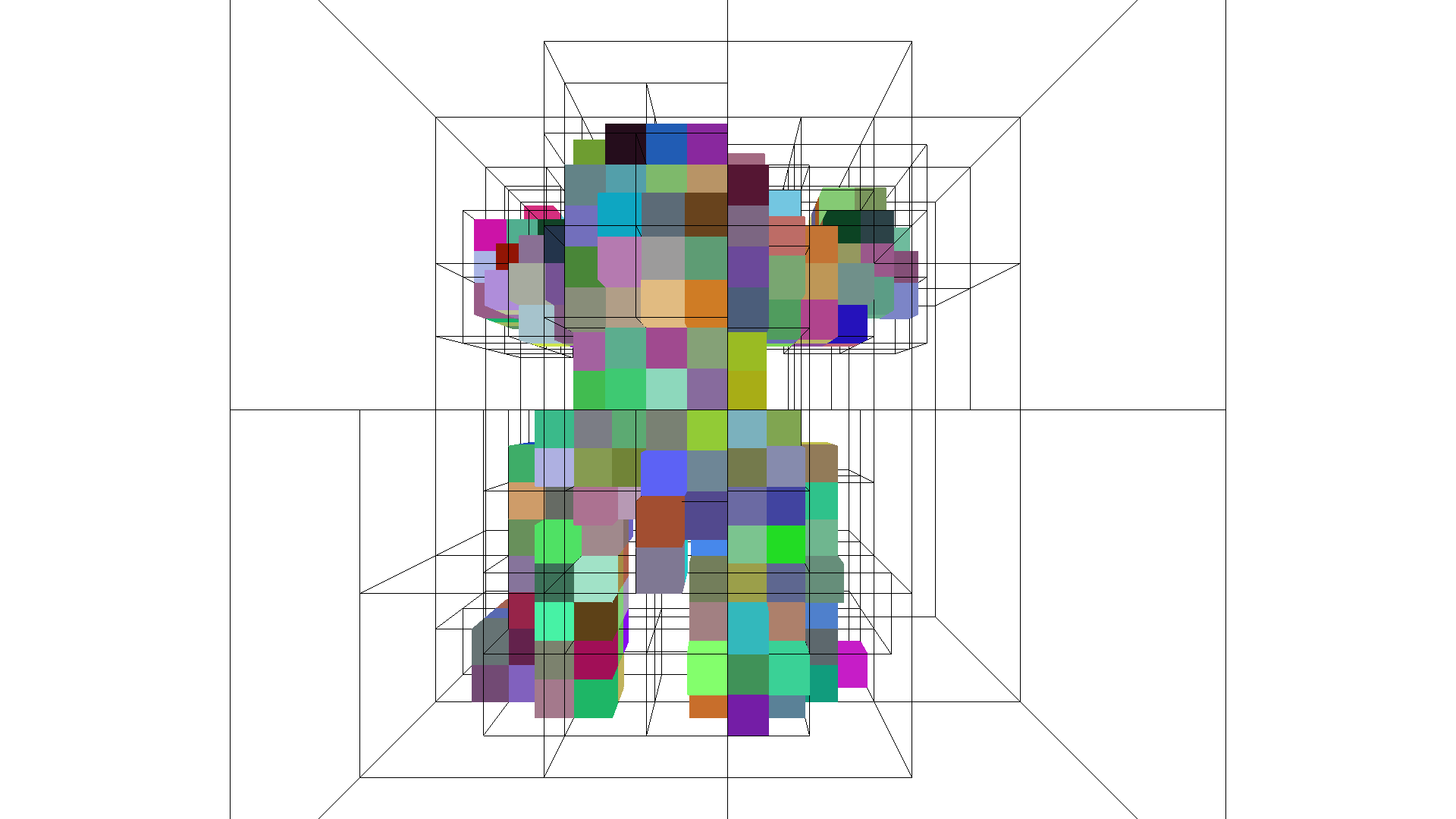
print('octree division')
octree = o3d.geometry.Octree(max_depth=4)
octree.create_from_voxel_grid(voxel_grid)
o3d.visualization.draw_geometries([octree])
voxelization
octree division
Additionally, an Octree can be converted to a VoxelGrid with to_voxel_grid.
Traversal¶
An octree can be traversed which can be useful for searching or processing subsections of 3D geometry. By providing the traverse method with a callback, each time a node (internal or leaf) is visited, additional processing can be performed.
In the following example, an early stopping criterion is used to only process internal/leaf nodes with more than a certain number of points. This early stopping ability can be used to efficiently process spatial regions meeting certain conditions.
[4]:
def f_traverse(node, node_info):
early_stop = False
if isinstance(node, o3d.geometry.OctreeInternalNode):
if isinstance(node, o3d.geometry.OctreeInternalPointNode):
n = 0
for child in node.children:
if child is not None:
n += 1
print(
"{}{}: Internal node at depth {} has {} children and {} points ({})"
.format(' ' * node_info.depth,
node_info.child_index, node_info.depth, n,
len(node.indices), node_info.origin))
# we only want to process nodes / spatial regions with enough points
early_stop = len(node.indices) < 250
elif isinstance(node, o3d.geometry.OctreeLeafNode):
if isinstance(node, o3d.geometry.OctreePointColorLeafNode):
print("{}{}: Leaf node at depth {} has {} points with origin {}".
format(' ' * node_info.depth, node_info.child_index,
node_info.depth, len(node.indices), node_info.origin))
else:
raise NotImplementedError('Node type not recognized!')
# early stopping: if True, traversal of children of the current node will be skipped
return early_stop
[5]:
octree = o3d.geometry.Octree(max_depth=4)
octree.convert_from_point_cloud(pcd, size_expand=0.01)
octree.traverse(f_traverse)
0: Internal node at depth 0 has 8 children and 2000 points ([-2.60937518 30.84885936 2.0167016 ])
0: Internal node at depth 1 has 4 children and 66 points ([-2.60937518 30.84885936 2.0167016 ])
1: Internal node at depth 1 has 2 children and 46 points ([-2.10437518 30.84885936 2.0167016 ])
2: Internal node at depth 1 has 8 children and 411 points ([-2.60937518 31.35385936 2.0167016 ])
0: Internal node at depth 2 has 2 children and 7 points ([-2.60937518 31.35385936 2.0167016 ])
1: Internal node at depth 2 has 1 children and 4 points ([-2.35687518 31.35385936 2.0167016 ])
2: Internal node at depth 2 has 4 children and 44 points ([-2.60937518 31.60635936 2.0167016 ])
3: Internal node at depth 2 has 1 children and 6 points ([-2.35687518 31.60635936 2.0167016 ])
4: Internal node at depth 2 has 4 children and 61 points ([-2.60937518 31.35385936 2.2692016 ])
5: Internal node at depth 2 has 5 children and 89 points ([-2.35687518 31.35385936 2.2692016 ])
6: Internal node at depth 2 has 4 children and 74 points ([-2.60937518 31.60635936 2.2692016 ])
7: Internal node at depth 2 has 6 children and 126 points ([-2.35687518 31.60635936 2.2692016 ])
3: Internal node at depth 1 has 7 children and 360 points ([-2.10437518 31.35385936 2.0167016 ])
0: Internal node at depth 2 has 1 children and 5 points ([-2.10437518 31.35385936 2.0167016 ])
2: Internal node at depth 2 has 1 children and 6 points ([-2.10437518 31.60635936 2.0167016 ])
3: Internal node at depth 2 has 4 children and 10 points ([-1.85187518 31.60635936 2.0167016 ])
4: Internal node at depth 2 has 4 children and 80 points ([-2.10437518 31.35385936 2.2692016 ])
5: Internal node at depth 2 has 4 children and 46 points ([-1.85187518 31.35385936 2.2692016 ])
6: Internal node at depth 2 has 6 children and 108 points ([-2.10437518 31.60635936 2.2692016 ])
7: Internal node at depth 2 has 6 children and 105 points ([-1.85187518 31.60635936 2.2692016 ])
4: Internal node at depth 1 has 5 children and 340 points ([-2.60937518 30.84885936 2.5217016 ])
0: Internal node at depth 2 has 4 children and 55 points ([-2.60937518 30.84885936 2.5217016 ])
1: Internal node at depth 2 has 4 children and 102 points ([-2.35687518 30.84885936 2.5217016 ])
2: Internal node at depth 2 has 2 children and 21 points ([-2.60937518 31.10135936 2.5217016 ])
3: Internal node at depth 2 has 8 children and 142 points ([-2.35687518 31.10135936 2.5217016 ])
7: Internal node at depth 2 has 1 children and 20 points ([-2.35687518 31.10135936 2.7742016 ])
5: Internal node at depth 1 has 4 children and 324 points ([-2.10437518 30.84885936 2.5217016 ])
0: Internal node at depth 2 has 8 children and 174 points ([-2.10437518 30.84885936 2.5217016 ])
1: Internal node at depth 2 has 1 children and 1 points ([-1.85187518 30.84885936 2.5217016 ])
2: Internal node at depth 2 has 8 children and 146 points ([-2.10437518 31.10135936 2.5217016 ])
6: Internal node at depth 2 has 1 children and 3 points ([-2.10437518 31.10135936 2.7742016 ])
6: Internal node at depth 1 has 6 children and 235 points ([-2.60937518 31.35385936 2.5217016 ])
7: Internal node at depth 1 has 5 children and 218 points ([-2.10437518 31.35385936 2.5217016 ])
Find leaf node containing point¶
Using the above traversal mechanism, an octree can be quickly searched for the leaf node that contains a given point. This functionality is provided via the locate_leaf_node method.
[6]:
octree.locate_leaf_node(pcd.points[0])
[6]:
(OctreePointColorLeafNode with color [0.101865, 0.488557, 0.292628] containing 3 points.,
OctreeNodeInfo with origin [-2.04125, 31.417, 2.58483], size 0.063125, depth 4, child_index 7)