Colored point cloud registration¶
This tutorial demonstrates an ICP variant that uses both geometry and color for registration. It implements the algorithm of [Park2017]. The color information locks the alignment along the tangent plane. Thus this algorithm is more accurate and more robust than prior point cloud registration algorithms, while the running speed is comparable to that of ICP registration. This tutorial uses notations from ICP registration.
Helper visualization function¶
In order to demonstrate the alignment between colored point clouds, draw_registration_result_original_color renders point clouds with their original color.
[2]:
def draw_registration_result_original_color(source, target, transformation):
source_temp = copy.deepcopy(source)
source_temp.transform(transformation)
o3d.visualization.draw_geometries([source_temp, target],
zoom=0.5,
front=[-0.2458, -0.8088, 0.5342],
lookat=[1.7745, 2.2305, 0.9787],
up=[0.3109, -0.5878, -0.7468])
Input¶
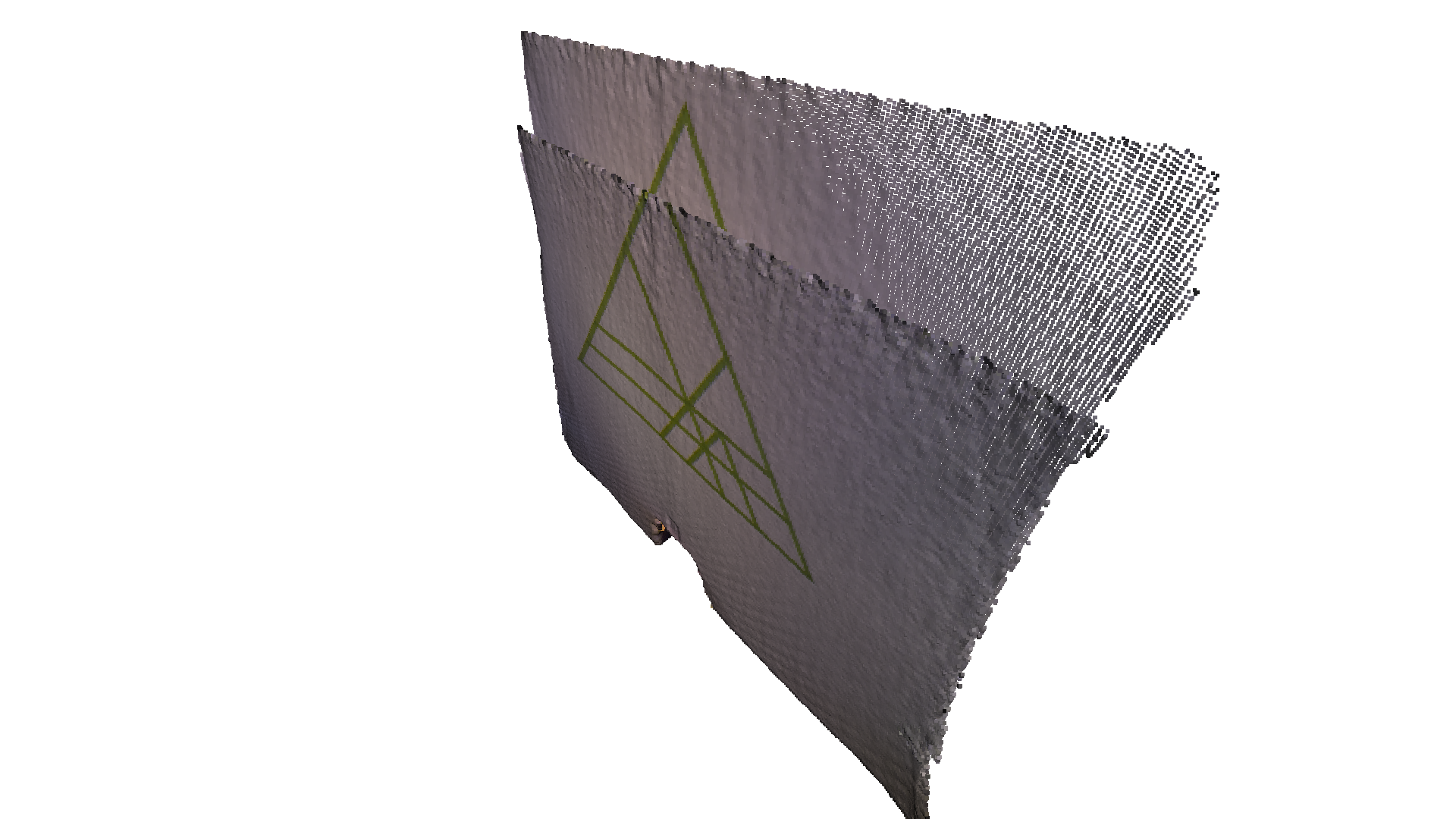
The code below reads a source point cloud and a target point cloud from two files. An identity matrix is used as initialization for the registration.
[3]:
print("1. Load two point clouds and show initial pose")
demo_colored_icp_pcds = o3d.data.DemoColoredICPPointClouds()
source = o3d.io.read_point_cloud(demo_colored_icp_pcds.paths[0])
target = o3d.io.read_point_cloud(demo_colored_icp_pcds.paths[1])
# draw initial alignment
current_transformation = np.identity(4)
draw_registration_result_original_color(source, target, current_transformation)
1. Load two point clouds and show initial pose
[Open3D INFO] Downloading https://github.com/isl-org/open3d_downloads/releases/download/20220201-data/DemoColoredICPPointClouds.zip
[Open3D INFO] Downloaded to /home/runner/open3d_data/download/DemoColoredICPPointClouds/DemoColoredICPPointClouds.zip
[Open3D INFO] Created directory /home/runner/open3d_data/extract/DemoColoredICPPointClouds.
[Open3D INFO] Extracting /home/runner/open3d_data/download/DemoColoredICPPointClouds/DemoColoredICPPointClouds.zip.
[Open3D INFO] Extracted to /home/runner/open3d_data/extract/DemoColoredICPPointClouds.
Point-to-plane ICP¶
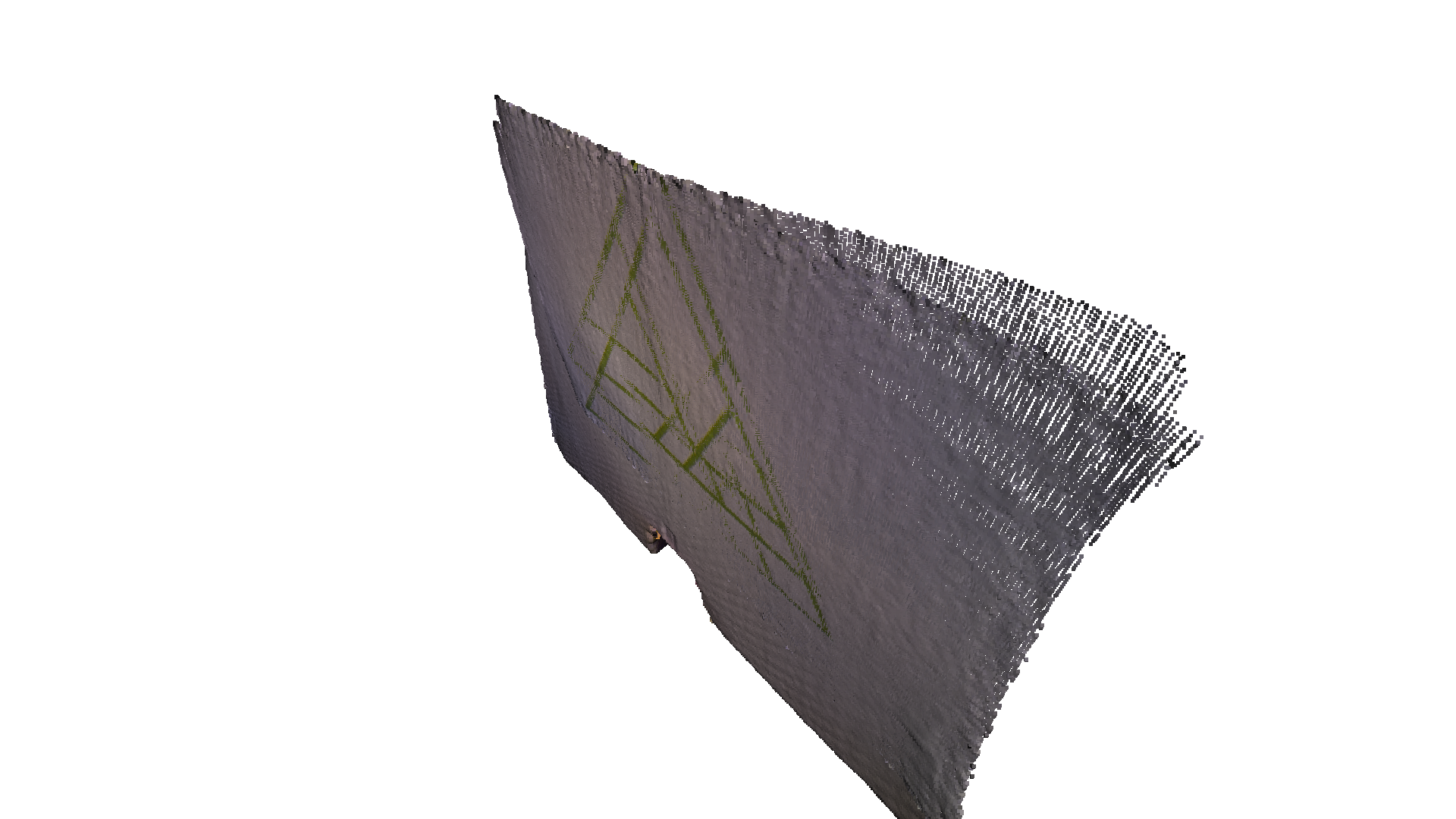
We first run Point-to-plane ICP as a baseline approach. The visualization below shows misaligned green triangle textures. This is because a geometric constraint does not prevent two planar surfaces from slipping.
[4]:
# point to plane ICP
current_transformation = np.identity(4)
print("2. Point-to-plane ICP registration is applied on original point")
print(" clouds to refine the alignment. Distance threshold 0.02.")
result_icp = o3d.pipelines.registration.registration_icp(
source, target, 0.02, current_transformation,
o3d.pipelines.registration.TransformationEstimationPointToPlane())
print(result_icp)
draw_registration_result_original_color(source, target,
result_icp.transformation)
2. Point-to-plane ICP registration is applied on original point
clouds to refine the alignment. Distance threshold 0.02.
RegistrationResult with fitness=9.745825e-01, inlier_rmse=4.220433e-03, and correspondence_set size of 62729
Access transformation to get result.
Colored point cloud registration¶
The core function for colored point cloud registration is registration_colored_icp. Following [Park2017], it runs ICP iterations (see Point-to-point ICP for details) with a joint optimization objective
where T is the transformation matrix to be estimated. EC and EG are the photometric and geometric terms, respectively. δ∈[0,1] is a weight parameter that has been determined empirically.
The geometric term EG is the same as the Point-to-plane ICP objective
where K is the correspondence set in the current iteration. np is the normal of point p.
The color term EC measures the difference between the color of point q (denoted as C(q)) and the color of its projection on the tangent plane of p.
where Cp(⋅) is a precomputed function continuously defined on the tangent plane of p. Functionf(⋅) projects a 3D point to the tangent plane. For more details, refer to [Park2017].
To further improve efficiency, [Park2017] proposes a multi-scale registration scheme. This has been implemented in the following script.
[5]:
# colored pointcloud registration
# This is implementation of following paper
# J. Park, Q.-Y. Zhou, V. Koltun,
# Colored Point Cloud Registration Revisited, ICCV 2017
voxel_radius = [0.04, 0.02, 0.01]
max_iter = [50, 30, 14]
current_transformation = np.identity(4)
print("3. Colored point cloud registration")
for scale in range(3):
iter = max_iter[scale]
radius = voxel_radius[scale]
print([iter, radius, scale])
print("3-1. Downsample with a voxel size %.2f" % radius)
source_down = source.voxel_down_sample(radius)
target_down = target.voxel_down_sample(radius)
print("3-2. Estimate normal.")
source_down.estimate_normals(
o3d.geometry.KDTreeSearchParamHybrid(radius=radius * 2, max_nn=30))
target_down.estimate_normals(
o3d.geometry.KDTreeSearchParamHybrid(radius=radius * 2, max_nn=30))
print("3-3. Applying colored point cloud registration")
result_icp = o3d.pipelines.registration.registration_colored_icp(
source_down, target_down, radius, current_transformation,
o3d.pipelines.registration.TransformationEstimationForColoredICP(),
o3d.pipelines.registration.ICPConvergenceCriteria(relative_fitness=1e-6,
relative_rmse=1e-6,
max_iteration=iter))
current_transformation = result_icp.transformation
print(result_icp)
draw_registration_result_original_color(source, target,
result_icp.transformation)
3. Colored point cloud registration
[50, 0.04, 0]
3-1. Downsample with a voxel size 0.04
3-2. Estimate normal.
3-3. Applying colored point cloud registration
RegistrationResult with fitness=8.763667e-01, inlier_rmse=1.457778e-02, and correspondence_set size of 2084
Access transformation to get result.
[30, 0.02, 1]
3-1. Downsample with a voxel size 0.02
3-2. Estimate normal.
3-3. Applying colored point cloud registration
RegistrationResult with fitness=8.661842e-01, inlier_rmse=8.759721e-03, and correspondence_set size of 7541
Access transformation to get result.
[14, 0.01, 2]
3-1. Downsample with a voxel size 0.01
3-2. Estimate normal.
3-3. Applying colored point cloud registration
RegistrationResult with fitness=8.437191e-01, inlier_rmse=4.851480e-03, and correspondence_set size of 24737
Access transformation to get result.
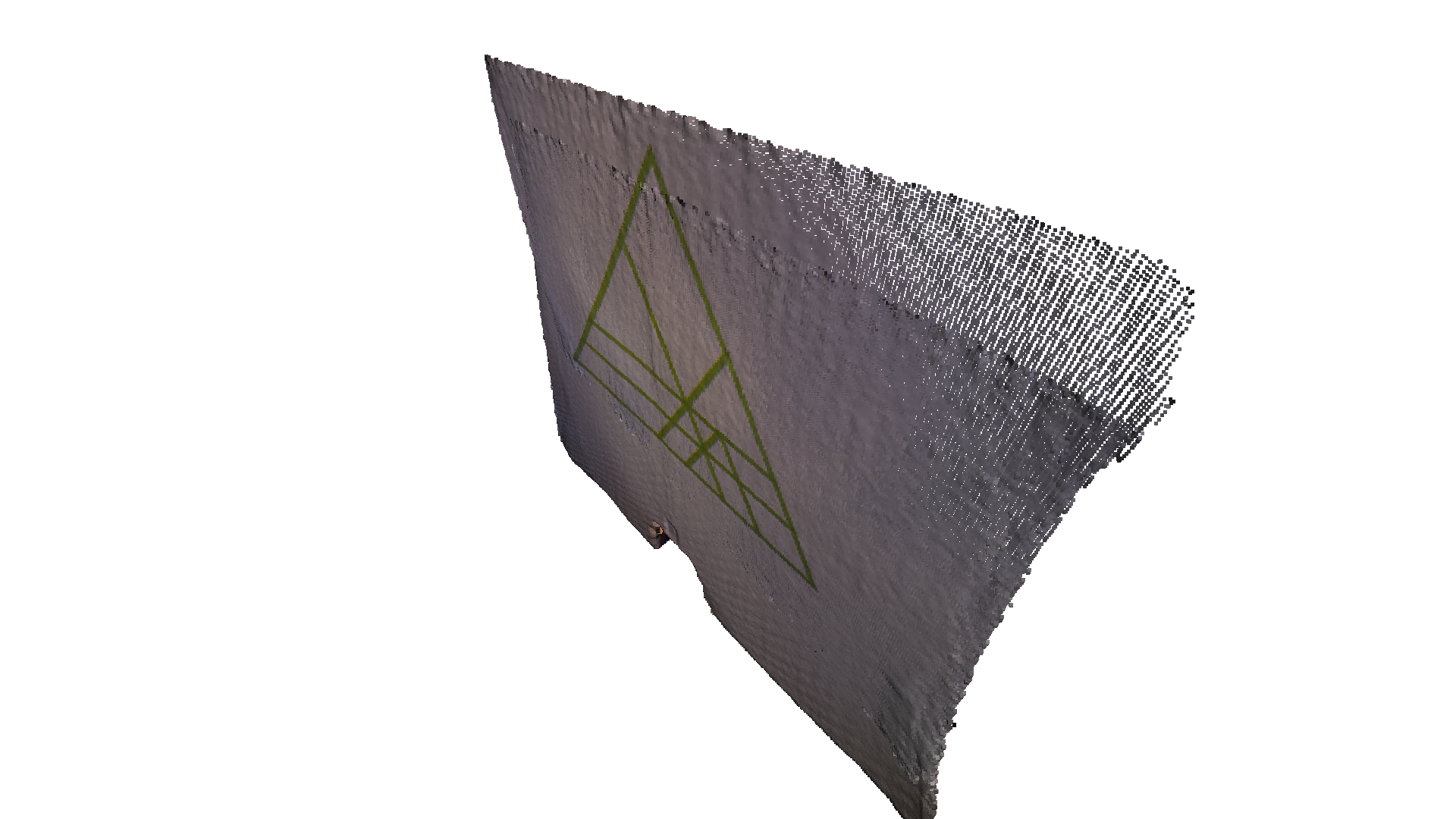
In total, 3 layers of multi-resolution point clouds are created with voxel_down_sample. Normals are computed with vertex normal estimation. The core registration function registration_colored_icp is called for each layer, from coarse to fine. lambda_geometric is an optional argument for registration_colored_icp that determines λ∈[0,1] in the overall energy λEG+(1−λ)EC.
The output is a tight alignment of the two point clouds. Notice the green triangles on the wall.