Surface Reconstruction¶
In many scenarios we want to generate a dense 3D geometry, i.e., a triangle mesh. However, from a multi-view stereo method, or a depth sensor we only obtain an unstructured point cloud. To get a triangle mesh from this unstructured input we need a surface reconstruction method. In the literature there exist a couple of methods and Open3D implements currently the following methods:
Alpha shapes [Edelsbrunner1983]
Ball pivoting [Bernardini1999]
Poisson [Kazhdan2006]
Alpha shapes¶
The alpha shape [Edelsbrunner1983] is a generalization of a convex hull. As described here one can intuitively think of an alpha shape as the following: Imagine a huge mass of ice-cream containing the points \(S\) as hard chocolate pieces. Using one of these sphere-formed ice-cream spoons we carve out all parts of the icecream block we can reach without bumping into chocolate pieces, thereby even carving out holes in the inside (e.g., parts not reachable by simply moving the spoon from the outside). We will eventually end up with a (not necessarily convex) object bounded by caps, arcs and points. If we now straighten all round faces to triangles and line segments, we have an intuitive description of what is called the alpha shape of \(S\).
Open3D implements the method create_from_point_cloud_alpha_shape that involves the tradeoff parameter alpha.
[2]:
mesh = o3dtut.get_bunny_mesh()
pcd = mesh.sample_points_poisson_disk(750)
o3d.visualization.draw_geometries([pcd])
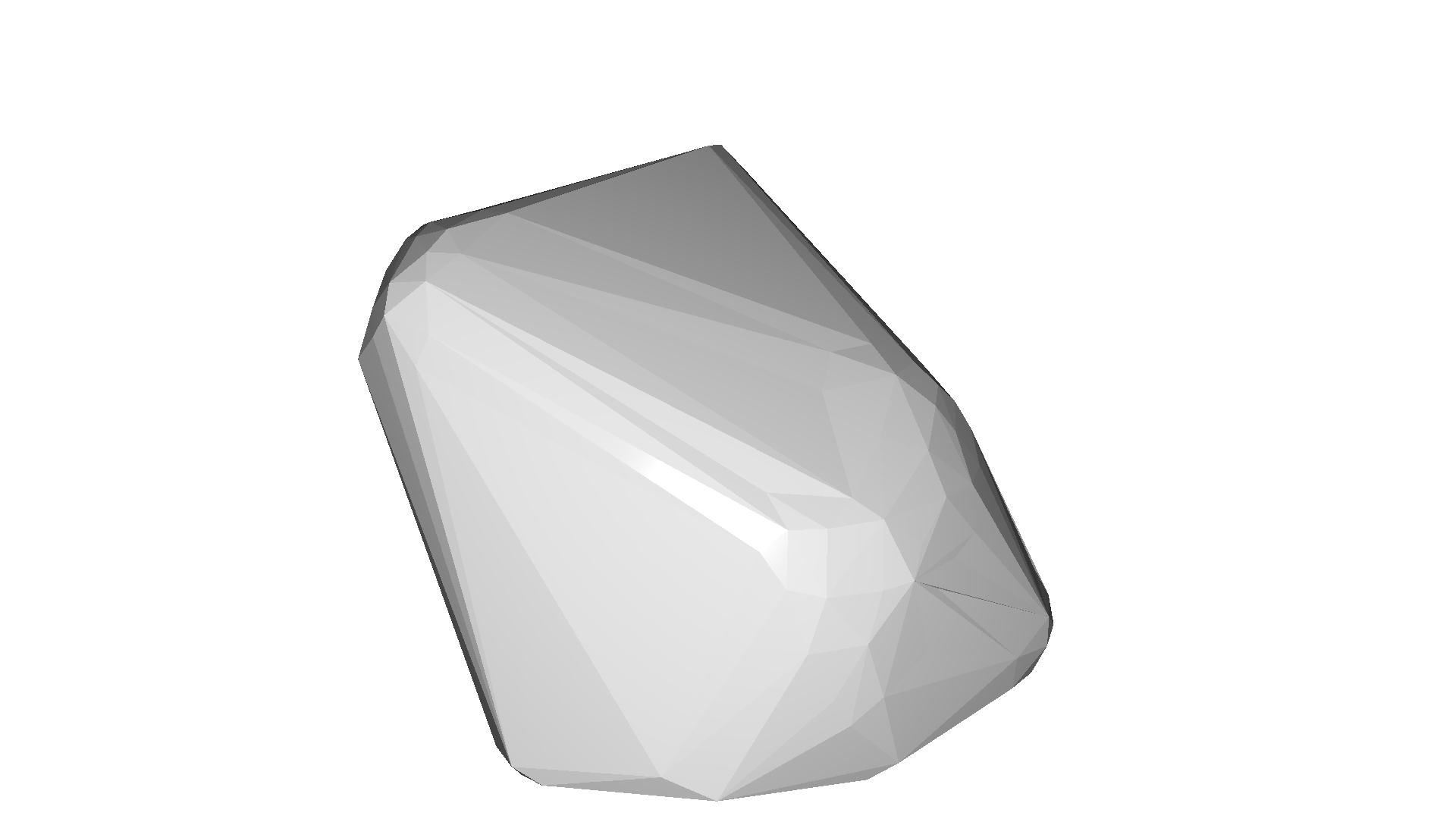
alpha = 0.03
print(f"alpha={alpha:.3f}")
mesh = o3d.geometry.TriangleMesh.create_from_point_cloud_alpha_shape(
pcd, alpha)
mesh.compute_vertex_normals()
o3d.visualization.draw_geometries([mesh], mesh_show_back_face=True)
alpha=0.030

The implementation is based on the convex hull of the point cloud. If we want to compute multiple alpha shapes from a given point cloud, then we can save some computation by only computing the convex hull once and pass it to create_from_point_cloud_alpha_shape.
[3]:
tetra_mesh, pt_map = o3d.geometry.TetraMesh.create_from_point_cloud(pcd)
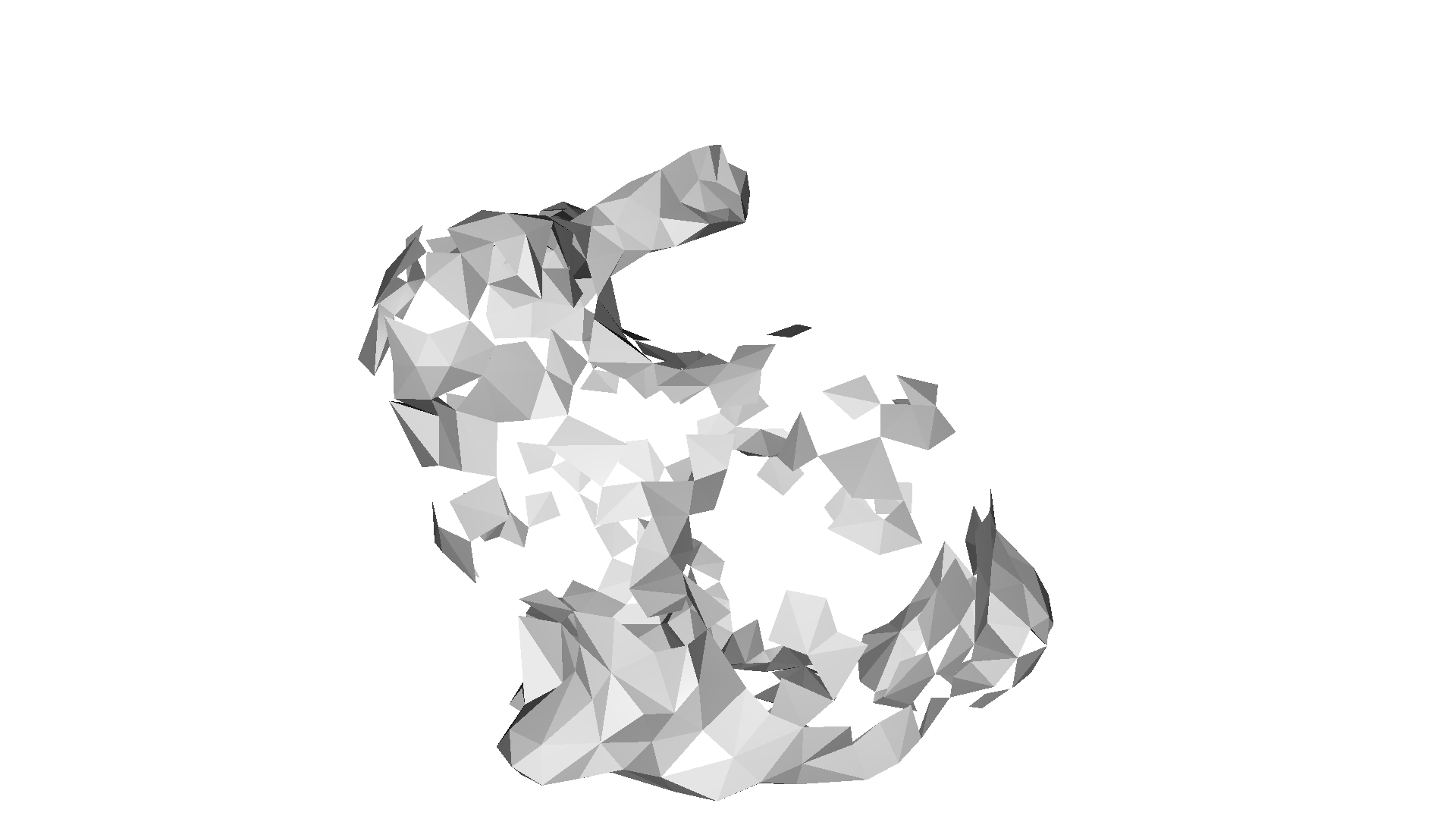
for alpha in np.logspace(np.log10(0.5), np.log10(0.01), num=4):
print(f"alpha={alpha:.3f}")
mesh = o3d.geometry.TriangleMesh.create_from_point_cloud_alpha_shape(
pcd, alpha, tetra_mesh, pt_map)
mesh.compute_vertex_normals()
o3d.visualization.draw_geometries([mesh], mesh_show_back_face=True)
alpha=0.500
alpha=0.136

alpha=0.037

alpha=0.010
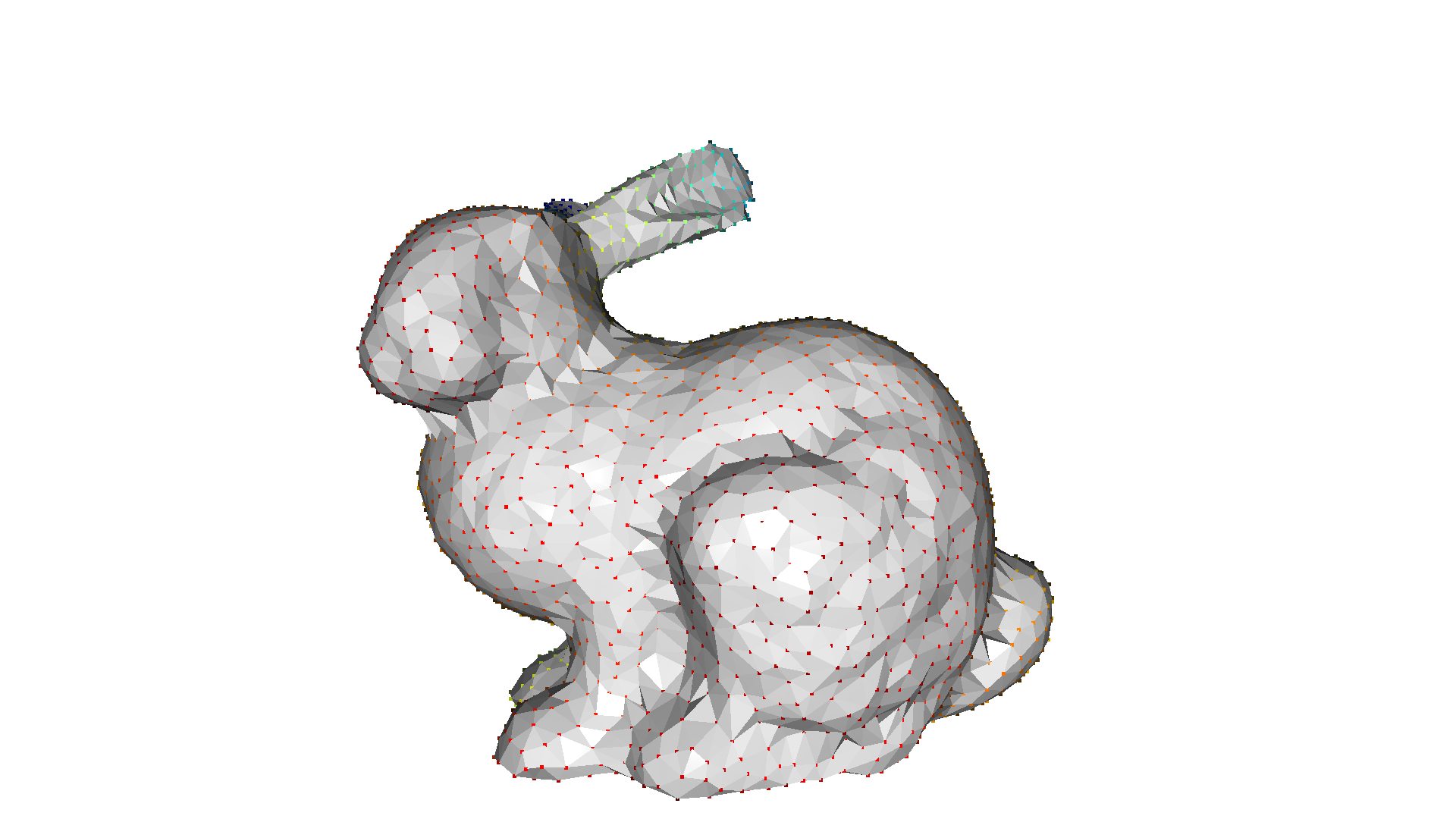
Ball pivoting¶
A to alpha shapes related method for surface reconstruction is the ball pivoting algorithm (BPA) [Bernardini1999]. Intuitively, think of a 3D ball with a given radius that we drop on the point cloud. If it hits any 3 points (and it does not fall through those 3 points) it creates a triangles. Then, the algorithm starts pivoting from the edges of the existing triangles and every time it hits 3 points where the ball does not fall through we create another triangle.
Open3D implements this method in create_from_point_cloud_ball_pivoting. The method accepts a list of radii as parameter that corresponds to the radii of the individual balls that are pivoted on the point cloud.
Note:
This algorithm assumes that the PointCloud has normals.
[4]:
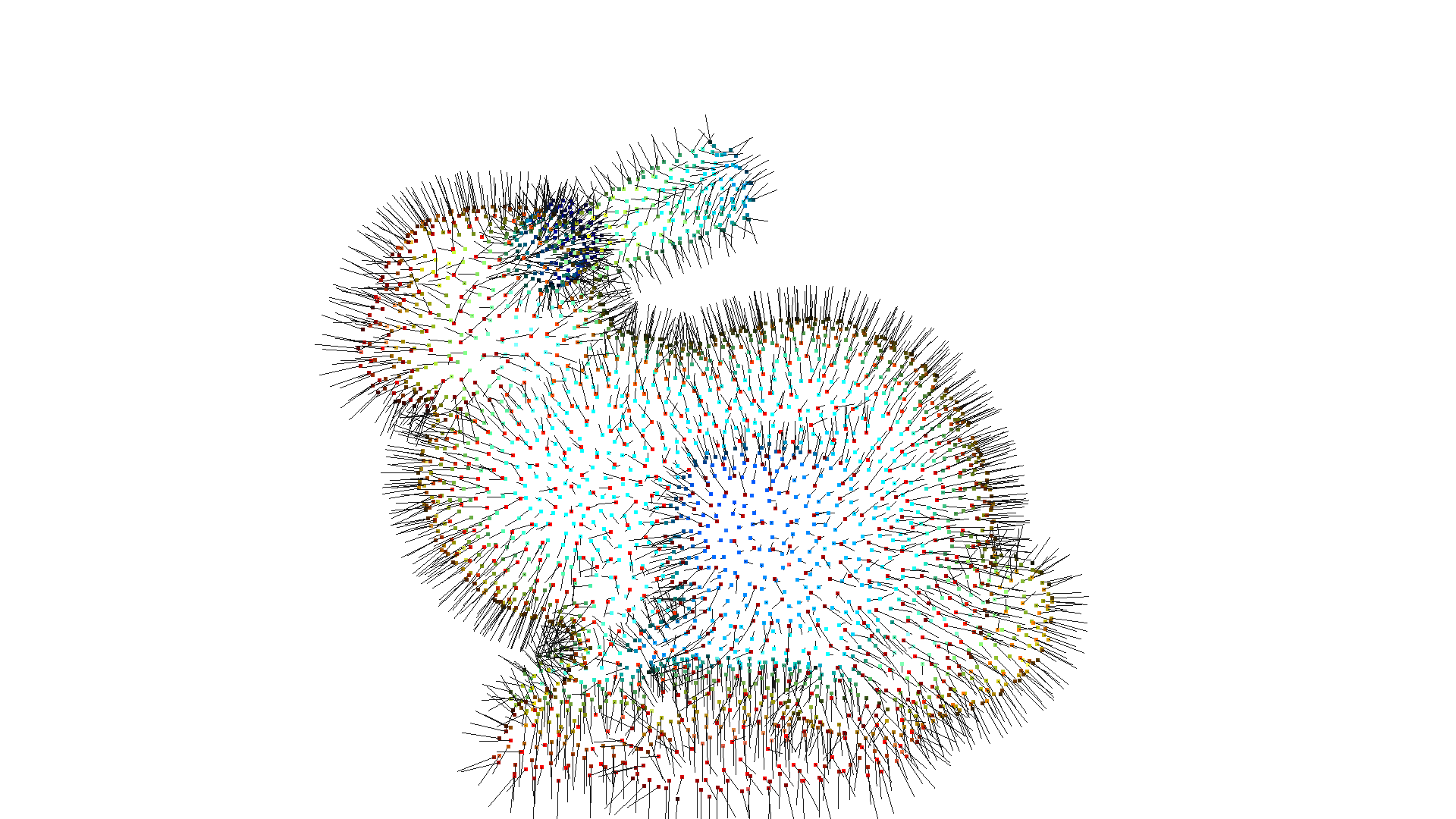
gt_mesh = o3dtut.get_bunny_mesh()
gt_mesh.compute_vertex_normals()
pcd = gt_mesh.sample_points_poisson_disk(3000)
o3d.visualization.draw_geometries([pcd], point_show_normal=True)
radii = [0.005, 0.01, 0.02, 0.04]
rec_mesh = o3d.geometry.TriangleMesh.create_from_point_cloud_ball_pivoting(
pcd, o3d.utility.DoubleVector(radii))
o3d.visualization.draw_geometries([pcd, rec_mesh])
Poisson surface reconstruction¶
The surface reconstruction methods produce non-smooth results as the points of the PointCloud are also the vertices of the triangle mesh without any modification. The Poisson surface reconstruction method [Kazhdan2006] solves a regularized optimization problem to obtain a smooth surface.
Open3D implements the method create_from_point_cloud_poisson that is basically a wrapper of the code of Kazhdan. An important parameter of the function is depth that defines the depth of the octree used for the surface reconstruction and hence, implies the resolution of the resulting triangle mesh. A higher depth values means a mesh with more details.
Note:
This algorithm assumes that the PointCloud has normals.
[5]:
pcd = o3dtut.get_eagle_pcd()
print(pcd)
o3d.visualization.draw_geometries([pcd], zoom=0.664,
front=[-0.4761, -0.4698, -0.7434],
lookat=[1.8900, 3.2596, 0.9284],
up=[0.2304, -0.8825, 0.4101])
print('run Poisson surface reconstruction')
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
mesh, densities = o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(pcd, depth=9)
print(mesh)
o3d.visualization.draw_geometries([mesh], zoom=0.664,
front=[-0.4761, -0.4698, -0.7434],
lookat=[1.8900, 3.2596, 0.9284],
up=[0.2304, -0.8825, 0.4101])
downloading eagle pcl
geometry::PointCloud with 796825 points.

run Poisson surface reconstruction
geometry::TriangleMesh with 563112 points and 1126072 triangles.

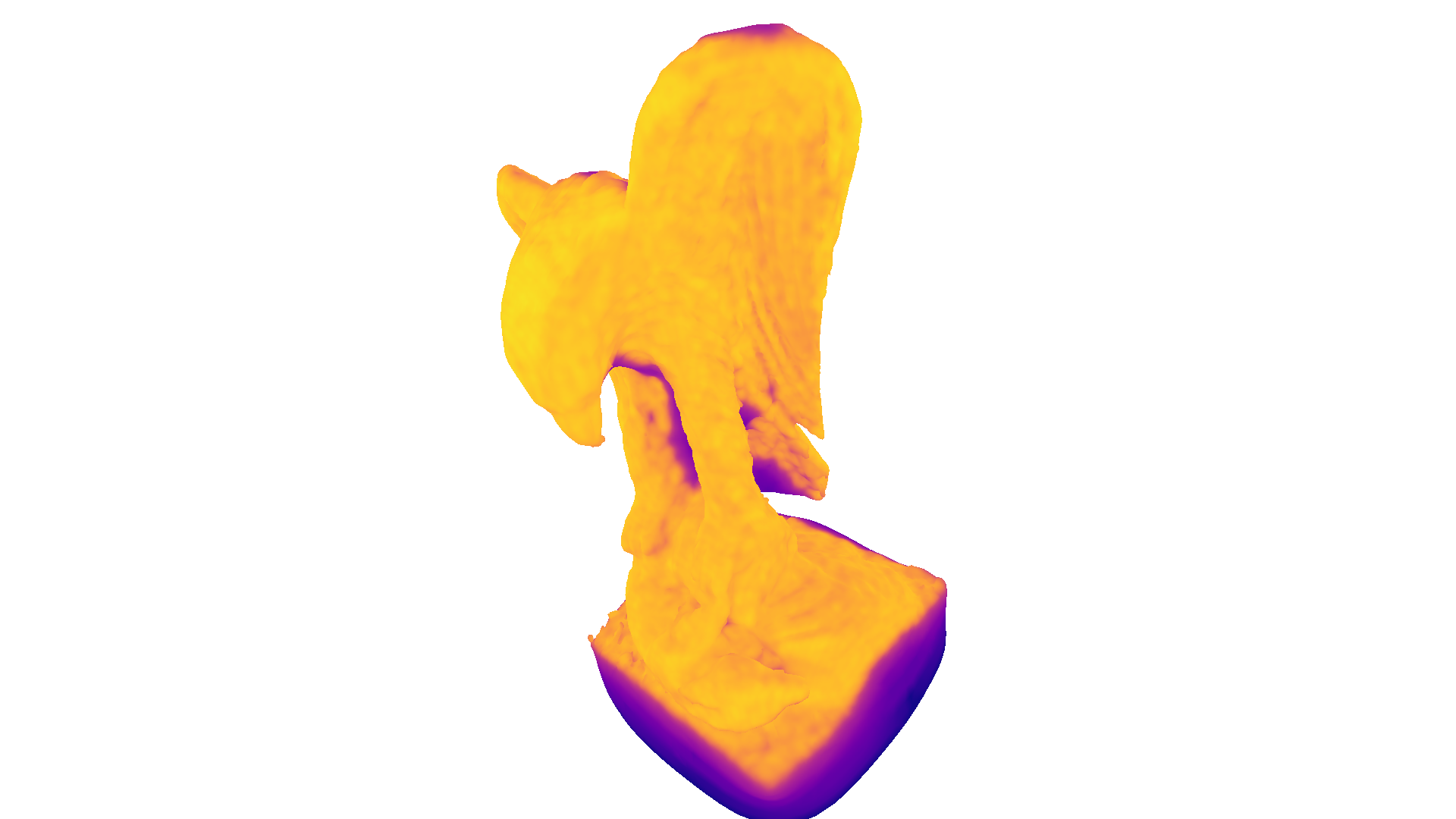
Poisson surface reconstruction will also create triangles in areas of low point density, and even extrapolates into some areas (see bottom of the eagle output above). The create_from_point_cloud_poisson function has a second densities return value that indicates for each vertex the density. A low density value means that the vertex is only supported by a low number of points from the input point cloud.
In the code below we visualize the density in 3D using pseudo color. Violet indicates low density and yellow indicates a high density.
[6]:
print('visualize densities')
densities = np.asarray(densities)
density_colors = plt.get_cmap('plasma')(
(densities - densities.min()) / (densities.max() - densities.min()))
density_colors = density_colors[:, :3]
density_mesh = o3d.geometry.TriangleMesh()
density_mesh.vertices = mesh.vertices
density_mesh.triangles = mesh.triangles
density_mesh.triangle_normals = mesh.triangle_normals
density_mesh.vertex_colors = o3d.utility.Vector3dVector(density_colors)
o3d.visualization.draw_geometries([density_mesh], zoom=0.664,
front=[-0.4761, -0.4698, -0.7434],
lookat=[1.8900, 3.2596, 0.9284],
up=[0.2304, -0.8825, 0.4101])
visualize densities
We can further use the density values to remove vertices and triangles that have a low support. In the code below we remove all vertices (and connected triangles) that have a lower density value than the \(0.01\) quantile of all density values.
[7]:
print('remove low density vertices')
vertices_to_remove = densities < np.quantile(densities, 0.01)
mesh.remove_vertices_by_mask(vertices_to_remove)
print(mesh)
o3d.visualization.draw_geometries([mesh], zoom=0.664,
front=[-0.4761, -0.4698, -0.7434],
lookat=[1.8900, 3.2596, 0.9284],
up=[0.2304, -0.8825, 0.4101])
remove low density vertices
geometry::TriangleMesh with 557480 points and 1113214 triangles.
