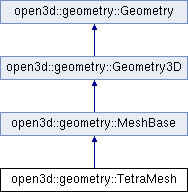
Tetra mesh contains vertices and tetrahedra represented by the indices to the vertices.
More...
|
| | TetraMesh () |
| | Default Constructor. More...
|
| |
| | TetraMesh (const std::vector< Eigen::Vector3d > &vertices, const std::vector< Eigen::Vector4i, utility::Vector4i_allocator > &tetras) |
| | Parameterized Constructor. More...
|
| |
| | ~TetraMesh () override |
| |
| TetraMesh & | Clear () override |
| | Clear all elements in the geometry. More...
|
| |
| TetraMesh & | operator+= (const TetraMesh &mesh) |
| |
| TetraMesh | operator+ (const TetraMesh &mesh) const |
| |
| TetraMesh & | RemoveDuplicatedVertices () |
| | Function that removes duplicated verties, i.e., vertices that have identical coordinates. More...
|
| |
| TetraMesh & | RemoveDuplicatedTetras () |
| | Function that removes duplicated tetrahedra, i.e., removes tetrahedra that reference the same four vertices, independent of their order. More...
|
| |
| TetraMesh & | RemoveUnreferencedVertices () |
| | This function removes vertices from the tetra mesh that are not referenced in any tetrahedron of the mesh. More...
|
| |
| TetraMesh & | RemoveDegenerateTetras () |
| | Function that removes degenerate tetrahedra, i.e., tetrahedra that reference a single vertex multiple times in a single tetrahedron. They are usually the product of removing duplicated vertices. More...
|
| |
| bool | HasTetras () const |
| | Returns true if the mesh contains tetras. More...
|
| |
| std::shared_ptr< TriangleMesh > | ExtractTriangleMesh (const std::vector< double > &values, double level) |
| | Function to extract a triangle mesh of the specified iso-surface at a level This method applies primal contouring and generates triangles for each tetrahedron. More...
|
| |
| | MeshBase () |
| | Default Constructor. More...
|
| |
| | ~MeshBase () override |
| |
| virtual bool | IsEmpty () const override |
| | Returns true iff the geometry is empty. More...
|
| |
| virtual Eigen::Vector3d | GetMinBound () const override |
| | Returns min bounds for geometry coordinates. More...
|
| |
| virtual Eigen::Vector3d | GetMaxBound () const override |
| | Returns max bounds for geometry coordinates. More...
|
| |
| virtual Eigen::Vector3d | GetCenter () const override |
| | Returns the center of the geometry coordinates. More...
|
| |
| virtual AxisAlignedBoundingBox | GetAxisAlignedBoundingBox () const override |
| |
| virtual OrientedBoundingBox | GetOrientedBoundingBox (bool robust=false) const override |
| |
| virtual OrientedBoundingBox | GetMinimalOrientedBoundingBox (bool robust=false) const override |
| |
| virtual MeshBase & | Transform (const Eigen::Matrix4d &transformation) override |
| | Apply transformation (4x4 matrix) to the geometry coordinates. More...
|
| |
| virtual MeshBase & | Translate (const Eigen::Vector3d &translation, bool relative=true) override |
| | Apply translation to the geometry coordinates. More...
|
| |
| virtual MeshBase & | Scale (const double scale, const Eigen::Vector3d ¢er) override |
| | Apply scaling to the geometry coordinates. Given a scaling factor \(s\), and center \(c\), a given point \(p\) is transformed according to \(s (p - c) + c\). More...
|
| |
| virtual MeshBase & | Rotate (const Eigen::Matrix3d &R, const Eigen::Vector3d ¢er) override |
| | Apply rotation to the geometry coordinates and normals. Given a rotation matrix \(R\), and center \(c\), a given point \(p\) is transformed according to \(R (p - c) + c\). More...
|
| |
| MeshBase & | operator+= (const MeshBase &mesh) |
| |
| MeshBase | operator+ (const MeshBase &mesh) const |
| |
| bool | HasVertices () const |
| | Returns True if the mesh contains vertices. More...
|
| |
| bool | HasVertexNormals () const |
| | Returns True if the mesh contains vertex normals. More...
|
| |
| bool | HasVertexColors () const |
| | Returns True if the mesh contains vertex colors. More...
|
| |
| MeshBase & | NormalizeNormals () |
| | Normalize vertex normals to length 1. More...
|
| |
| MeshBase & | PaintUniformColor (const Eigen::Vector3d &color) |
| | Assigns each vertex in the TriangleMesh the same color. More...
|
| |
| std::tuple< std::shared_ptr< TriangleMesh >, std::vector< size_t > > | ComputeConvexHull () const |
| | Function that computes the convex hull of the triangle mesh using qhull. More...
|
| |
| | ~Geometry3D () override |
| |
| virtual Geometry3D & | Rotate (const Eigen::Matrix3d &R) |
| |
| virtual | ~Geometry () |
| |
| GeometryType | GetGeometryType () const |
| | Returns one of registered geometry types. More...
|
| |
| int | Dimension () const |
| | Returns whether the geometry is 2D or 3D. More...
|
| |
| std::string | GetName () const |
| |
| void | SetName (const std::string &name) |
| |
|
| | TetraMesh (Geometry::GeometryType type) |
| |
| | MeshBase (Geometry::GeometryType type) |
| |
| | MeshBase (Geometry::GeometryType type, const std::vector< Eigen::Vector3d > &vertices) |
| |
| | Geometry3D (GeometryType type) |
| | Parameterized Constructor. More...
|
| |
| Eigen::Vector3d | ComputeMinBound (const std::vector< Eigen::Vector3d > &points) const |
| | Compute min bound of a list points. More...
|
| |
| Eigen::Vector3d | ComputeMaxBound (const std::vector< Eigen::Vector3d > &points) const |
| | Compute max bound of a list points. More...
|
| |
| Eigen::Vector3d | ComputeCenter (const std::vector< Eigen::Vector3d > &points) const |
| | Computer center of a list of points. More...
|
| |
| void | ResizeAndPaintUniformColor (std::vector< Eigen::Vector3d > &colors, const size_t size, const Eigen::Vector3d &color) const |
| | Resizes the colors vector and paints a uniform color. More...
|
| |
| void | TransformPoints (const Eigen::Matrix4d &transformation, std::vector< Eigen::Vector3d > &points) const |
| | Transforms all points with the transformation matrix. More...
|
| |
| void | TransformNormals (const Eigen::Matrix4d &transformation, std::vector< Eigen::Vector3d > &normals) const |
| | Transforms the normals with the transformation matrix. More...
|
| |
| void | TransformCovariances (const Eigen::Matrix4d &transformation, std::vector< Eigen::Matrix3d > &covariances) const |
| | Transforms all covariance matrices with the transformation. More...
|
| |
| void | TranslatePoints (const Eigen::Vector3d &translation, std::vector< Eigen::Vector3d > &points, bool relative) const |
| | Apply translation to the geometry coordinates. More...
|
| |
| void | ScalePoints (const double scale, std::vector< Eigen::Vector3d > &points, const Eigen::Vector3d ¢er) const |
| | Scale the coordinates of all points by the scaling factor scale. More...
|
| |
| void | RotatePoints (const Eigen::Matrix3d &R, std::vector< Eigen::Vector3d > &points, const Eigen::Vector3d ¢er) const |
| | Rotate all points with the rotation matrix R. More...
|
| |
| void | RotateNormals (const Eigen::Matrix3d &R, std::vector< Eigen::Vector3d > &normals) const |
| | Rotate all normals with the rotation matrix R. More...
|
| |
| void | RotateCovariances (const Eigen::Matrix3d &R, std::vector< Eigen::Matrix3d > &covariances) const |
| | Rotate all covariance matrices with the rotation matrix R. More...
|
| |
| | Geometry (GeometryType type, int dimension) |
| | Parameterized Constructor. More...
|
| |
Tetra mesh contains vertices and tetrahedra represented by the indices to the vertices.
 Public Member Functions inherited from open3d::geometry::MeshBase
Public Member Functions inherited from open3d::geometry::MeshBase