open3d.ml.tf.models.RandLANet¶
-
class
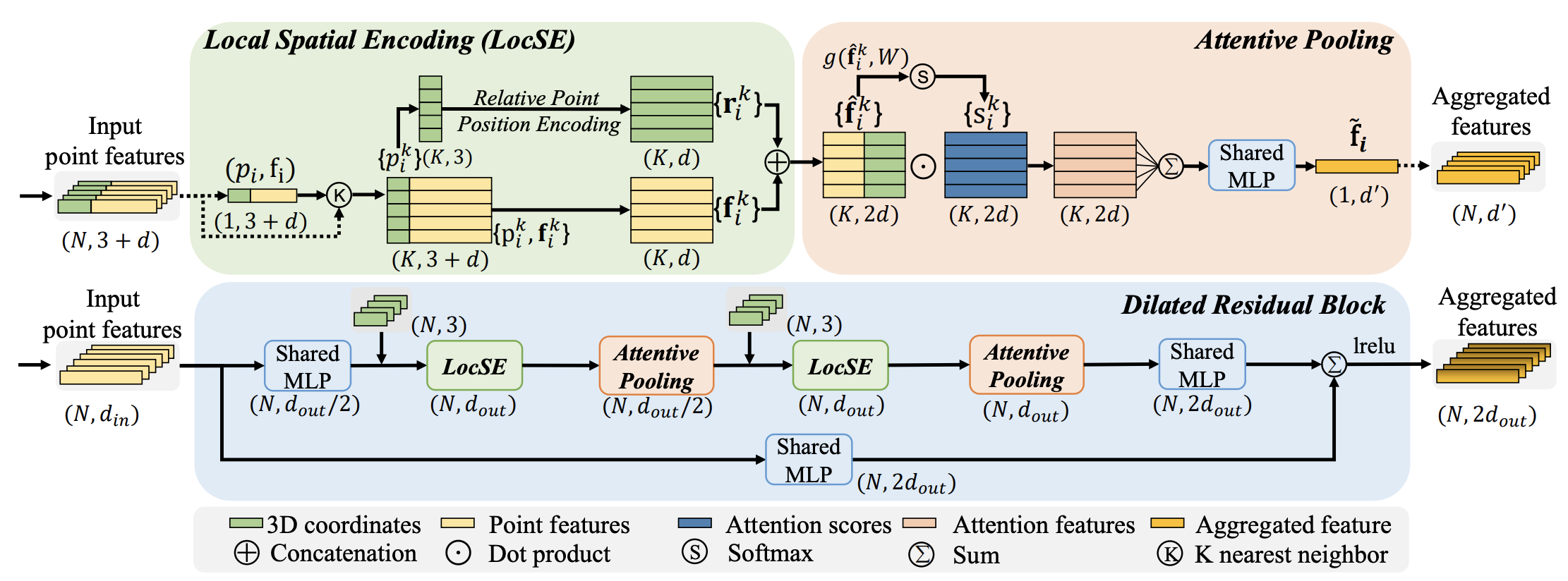
open3d.ml.tf.models.RandLANet(*args, **kwargs)¶ Class defining RandLANet, a Semantic Segmentation model. Based on the architecture from the paper RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds.
RandLA-Net is an efficient and lightweight neural architecture which directly infer per-point semantics for large-scale point clouds. The key approach is to use random point sampling instead of more complex point selection approaches. Although remarkably computation and memory efficient, random sampling can discard key features by chance. To overcome this, we introduce a novel local feature aggregation module to progressively increase the receptive field for each 3D point, thereby effectively preserving geometric details.
Architecture
References
https://github.com/QingyongHu/RandLA-Net
-
__init__(name='RandLANet', num_neighbors=16, num_layers=4, num_points=45056, num_classes=19, ignored_label_inds=[0], sub_sampling_ratio=[4, 4, 4, 4], in_channels=3, dim_features=8, dim_output=[16, 64, 128, 256], grid_size=0.06, batcher='DefaultBatcher', ckpt_path=None, augment=None, **kwargs)¶ Initialize self. See help(type(self)) for accurate signature.
-
call(inputs, training=True)¶ Calls the model on new inputs.
In this case call just reapplies all ops in the graph to the new inputs (e.g. build a new computational graph from the provided inputs).
Note: This method should not be called directly. It is only meant to be overridden when subclassing tf.keras.Model. To call a model on an input, always use the __call__ method, i.e. model(inputs), which relies on the underlying call method.
- Parameters
inputs – A tensor or list of tensors.
training – Boolean or boolean scalar tensor, indicating whether to run the Network in training mode or inference mode.
mask – A mask or list of masks. A mask can be either a tensor or None (no mask).
- Returns
A tensor if there is a single output, or a list of tensors if there are more than one outputs.
-
static
gather_neighbour(pc, neighbor_idx)¶
-
get_batch_gen(dataset, steps_per_epoch=None, batch_size=1)¶
-
get_loss(Loss, results, inputs)¶ Calculate the loss on output of the model.
- Parameters
Loss – Object of type SemSegLoss.
results – Output of the model (B, N, C).
inputs – Input of the model.
device – device(cpu or cuda).
- Returns
Returns loss, labels and scores.
-
get_optimizer(cfg_pipeline)¶ Returns an optimizer object for the model.
- Parameters
cfg_pipeline – A Config object with the configuration of the pipeline.
- Returns
Returns a new optimizer object.
-
inference_begin(data)¶ Function called right before running inference.
- Parameters
data – A data from the dataset.
-
inference_end(results)¶ This function is called after the inference.
This function can be implemented to apply post-processing on the network outputs.
- Parameters
results – The model outputs as returned by the call() function. Post-processing is applied on this object.
- Returns
Returns True if the inference is complete and otherwise False. Returning False can be used to implement inference for large point clouds which require multiple passes.
-
inference_preprocess()¶ This function prepares the inputs for the model.
- Returns
The inputs to be consumed by the call() function of the model.
-
static
nearest_interpolation(feature, interp_idx)¶ - Parameters
feature – [B, d, N] input features matrix
interp_idx – [B, up_num_points, 1] nearest neighbour index
- Returns
[B, up_num_points, d] interpolated features matrix
-
preprocess(data, attr)¶ Data preprocessing function.
This function is called before training to preprocess the data from a dataset.
- Parameters
data – A sample from the dataset.
attr – The corresponding attributes.
- Returns
Returns the preprocessed data
-
static
random_sample(feature, pool_idx)¶ - Parameters
feature – [B, d, N, 1] input features matrix
pool_idx – [B, N’, max_num] N’ < N, N’ is the selected position after pooling
- Returns
pool_features = [B, N’, d] pooled features matrix
-
transform(pc, feat, label)¶ Transform function for the point cloud and features.
- Parameters
args – A list of tf Tensors.
-
transform_inference(data, min_possibility_idx)¶
-